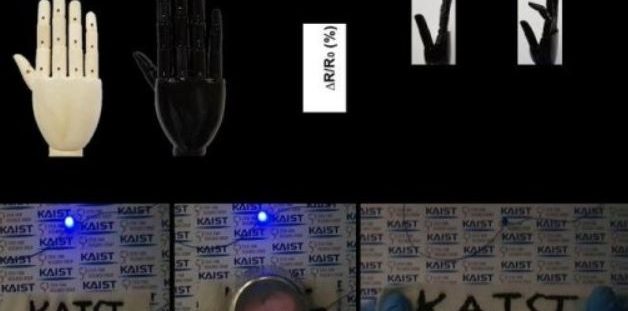
如果能够给予触觉感应能力,wellbet 机器人将能够执行各种各样的任务以及人类。 KAIST研究小组通过使用基于溶液的全过程报告了一种可伸缩的压力不敏感应变传感器。基于溶液的工艺可轻松扩展以适应大面积,并可通过喷涂在三维不规则形状的物体上涂覆薄膜。这些条件使其加工技术独特,非常适用于机器人电子皮肤或可穿戴电子应用。
制作电子皮肤以模仿人体皮肤的触觉传感特性是可穿戴电子学,wellbet下载 机器人和假肢等各种应用的研究活跃领域。电子皮肤研究的主要挑战之一是区分各种外部刺激,特别是应变和压力之间的刺激。另一个问题是在三维不规则形状的物体上均匀地沉积电皮。
为了克服这些问题,wellbet手机 由材料科学与工程系的Steve Park教授和机械工程系的Jung Kim教授领导的研究小组开发了可以均匀涂覆在三维表面上并区分机械刺激的电子皮肤。新的电子皮肤还可以区分类似于人体皮肤的机械刺激。